In the expansive realm of robotics, particularly soft robotics, the advent of Fabric-Based Soft Pneumatic Actuators (FSPAs) marks a significant evolution. These innovative devices leverage the principles of soft materials and pneumatic systems to facilitate movement and deformation, essential for applications such as wearable technology, assistive devices, and robotic grippers. FSPAs are characterized by their soft and lightweight properties, offering unparalleled flexibility when interacting with humans and fragile items—a stark contrast to the rigid structures typical of conventional robotics. While the promise of FSPAs is vast, their design and manufacturing processes pose unique challenges that have garnered the attention of a dedicated research team.
Creating effective FSPAs is an intricate task, primarily due to the need for controlled deformation in response to varying pressures. Traditional methods often rely on trial-and-error techniques, consuming significant time and resources to identify the right material and geometric features. The general approach has been to utilize isotropic materials—those that behave uniformly regardless of direction. While effective in ensuring consistent inflation, these materials can limit the dynamic capabilities of the actuators. Therefore, a paradigm shift in design methodology is crucial to optimizing performance.
Insights from Turing’s Morphogenesis Theory
The recent research discussed in Scientific Reports provides a groundbreaking approach to tackle these design challenges by integrating Alan Turing’s morphogenesis theory. Initially proposed in 1952, Turing patterns explain how complex patterns in nature arise through the interaction of two substances—one that enhances growth and another that inhibits it. This theory presents a compelling framework for creating surface patterns on FSPAs that can influence their behavior under inflation. By adopting Turing patterns, the researchers aimed to incorporate unique surface textures that facilitate advanced movements while simplifying the actuator design.
Led by Dr. Masato Tanaka and Dr. Tsuyoshi Nomura from Toyota Central R&D Labs. in Japan, along with Dr. Yuyang Song from Toyota Motor Engineering and Manufacturing North America, the team’s motivation stemmed from the soft robotics community’s pressing need for low-cost and easily fabricated pneumatic actuators. They sought to bypass the extensive trial-and-error process inherent in actuator design by employing a gradient-based orientation optimization method. Such a method allows for the deliberate arrangement of material fibers to manipulate how an actuator deforms, thereby enhancing movement control.
The core of their innovative approach lies in utilizing anisotropic materials—materials with directional properties—to shape the actuator’s surface. To achieve this, the team applied the nonlinear finite element method to optimize the orientation of these materials, translating complex mathematical models into physical patterns on the FSPA. By creating these anisotropic Turing pattern textures, they were able to secure the desired deformations under pressure, facilitating intricate movements and broadened functionality.
Fabrication Techniques for FSPAs
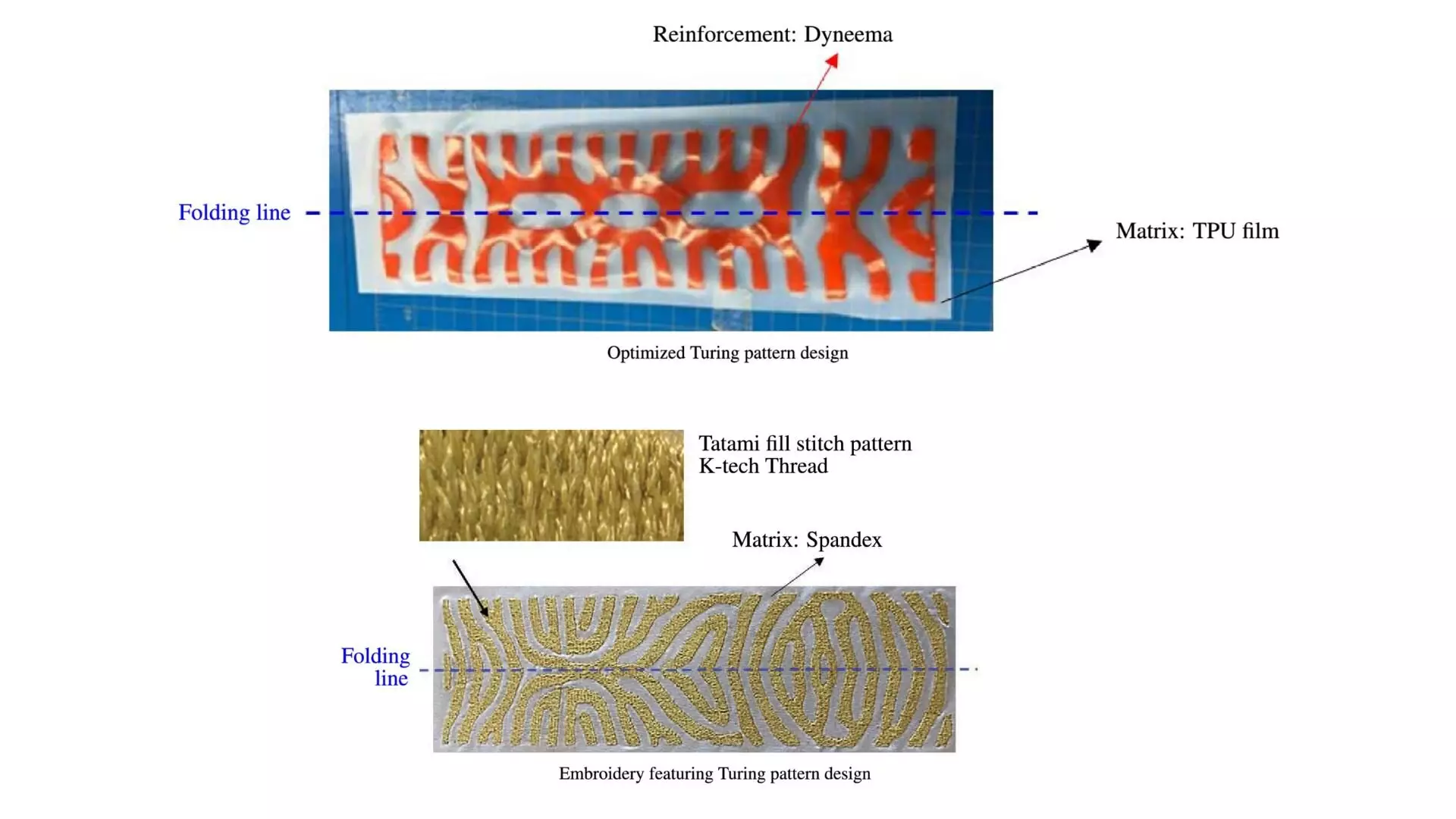
The research team explored multiple fabrication techniques, including heat bonding and embroidery, to produce their optimized designs. Heat bonding involves laser-cutting a rigid fabric into the Turing patterns and fusing it with a softer material under heat. Alternatively, the embroidery technique incorporates stiff threads into soft fabrics to produce varied stiffness levels within the actuator—essential for tailored movements. Both methods underscore the team’s commitment to scalability and cost-efficiency, essential for the future of soft robotics.
Evaluations comparing their Turing-patterned designs against traditional models yielded promising results, often showcasing superior performance—particularly in C-shaped configurations where Turing designs reduced actuator edge distances significantly. The researchers concluded that their method enabled efficient motion with minimal input. Looking forward, they expressed interest in integrating their designs with cutting-edge materials such as shape memory alloys and electroactive polymers to further enhance actuator dynamics. They also plan to scale their fabrication techniques for mass production, exploring innovative methods like automated weaving and flexible 3D printing to optimize efficiency and accuracy.
The exploration of Turing patterns in the development of fabric-based soft pneumatic actuators illuminates a critical avenue for advancing soft robotics. This approach not only addresses existing design challenges but also expands the potential applications of FSPAs in various domains. With ongoing research and technological advancements, the prospects for creating sophisticated, cost-effective, and safe robotic systems appear increasingly promising, paving the way for a new era in human-robot interaction.